Magnetic marker switch
The magnetic marker switch is responsible for detecting the magnetic markers. It has a sensing distance of up to 10 cm. For optimal performance, the marker switch arm should be adjusted in height so the switch is centered on the magnetic marker. The arm length should also be adjusted so the switch is as close as possible to the magnetic markers but without hitting them when the robot moves.
The current status of the magnetic marker switch is shown on the start screen. A big blue dot means a marker (or something magnetic) currently is detected.
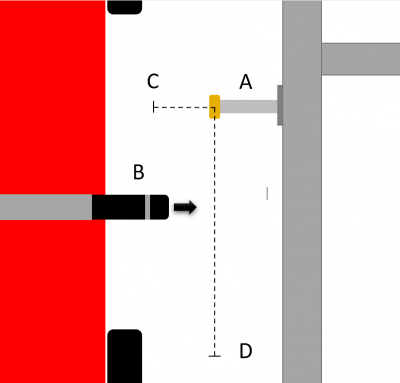
How to adjust the magnetic sensor:
A: Mount the magnetic markers in the brackets.
B: Tilt the sensor so it points towards the markers.
C: Adjust the distance out from the marker. Maximum 10 cm away. Make sure the sensor cannot physically hit the markers.
D: The magnetic sensor shall be within 1 meter before the marker. Move the robot to preferred position.