Motors
The robot has 7 DC gear motors which drive the different robot functions. The motors are casted in polyurethane in order to be protected from water.
The motors can be divided into 2 types with different gearing: a 220 rpm variant and a 70 rpm variant.
The 220 rpm variant is used for the hose reel and robot wheels. The 70 rpm variant is used for the boom actuator, tower, telescope, arm and nozzle. Note that the boom actuator assembly should not be taken apart and the nozzle motor has a shorter axle than the other 70 rpm motors.
Connector
In the motor connectors pin 1 and 2 are used for powering the motor, pin 3 is for pulse feedback and pin 4 is for pulse sensor power.
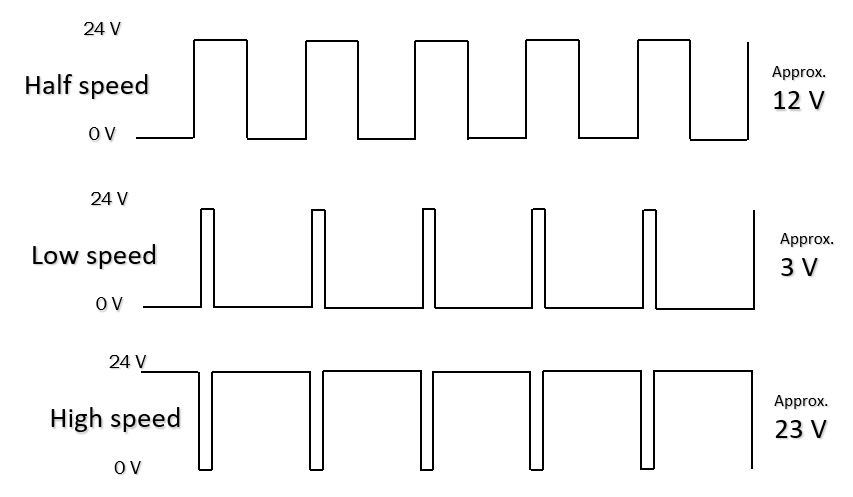
PWM
The motor power and speed is controlled by the circuit board electronics by means of pulse with modulation (PWM). This means that the power to the motor is shopped over time.