Arm
Motor: 70 rpm
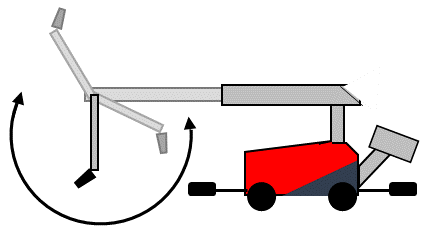
Stroke: parking position to parking+1150, about 315°
Parking: about -55, parallel to boom (more info about parking here)
Zero position sensor: about 15° out from parked position
The arm is one of the circular movements of the robot and should be used predominantly together with the tower and the nozzle during washing.
See the exploded view of the arm here