
Parking
The movable functions on the robot have so-called parking positions. The robot starts from these positions when you create a new program. The robot registers the current parking positions when programming and uses these as references for the automatic wash. Therefore, it’s very important that your robot always has the same physical parking positions.
To be able to set the parking positions the robots functions must do a “homing” procedure.
If the robots physical parking positions have changed and you start a program (other than the robot had under the teach-in), this program would wash incorrect and there is a risk that the robot get an alarm due to incorrectly movements (alarms=ineffective robot) or you could have a poor result of the wash.
Parking positions are pre-programmed at Envirologic and should only be changed by trained service personnel. Contact Envirologic if necessary.
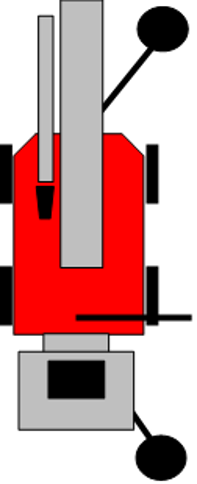
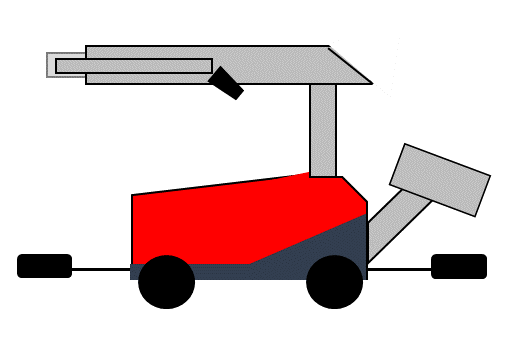
How EVO Cleaner stands when parked:
Boom: Parked when it is horizontal. Position ~700-720.
Tower: Boom pointing straight ahead in the robot's direction. Position 0 ±10. For details see this instruction.
Telescope: Fully retracted. Position 0 +1
Arm: Parallel with the boom. Position -55 ±5
Nozzle: Rotor nozzle pointing downwards towards the robot when arm is parallel with the boom. Position 0 ±2
Keep these positions in mind when the automatic wash starts, and the robot makes its first automatic parking after it has sensed the first marker. Does the robot set as above? The robot also parks after a program is finished.