
Homing
Homing means initialization (calibration) of the boom, tower, telescope, arm and nozzle absolute positions. If the robot have lost its homing, you need to redo the homing procedure.
<font 16px/inherit;;inherit;;inherit>Symbol explanations:</font>
![]() = Homing needed.
= Homing needed.
![]() = Zero position sensor is active.
= Zero position sensor is active.
These symbols is shown at the function that it refers to.
Instruction
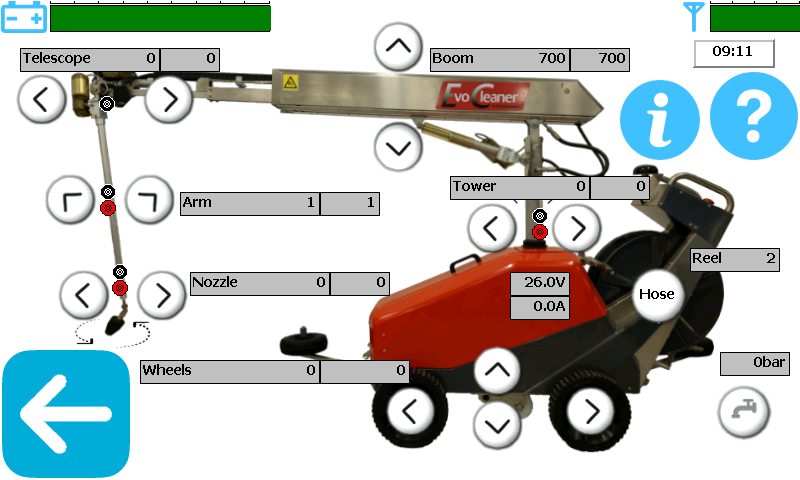
1. From the start screen, go to manual screen.
2. Press the![]() -button (information / detailed view) on the top right corner so you can see the absolute positions for all functions.
-button (information / detailed view) on the top right corner so you can see the absolute positions for all functions.
3. Move the boom to the absolute bottom. Check that the position is zeroed (0 or +1) automatically when it stops at the bottom.
- a. If not zeroed, continue to hold the boom down-button until you receive a question.
- b. Press “Yes” on the question.
4. Move the towertwice in each direction, passing the home position sensor. The sensor indicator is active when showing a black/white dot on your screen. The red homing indicator disappears when the homing is done.
- a. Check that the sensor is active when the tower points forward.
- b. Move the tower to the left, about 20 degrees, until the sensor indicator becomes inactive.
- c. Move the tower to the right until the sensor indicator becomes active and then inactive again.
- d. Repeat the sweep to the left and to the right until the red dot disappears.
- e. Move back so the tower points straight ahead.
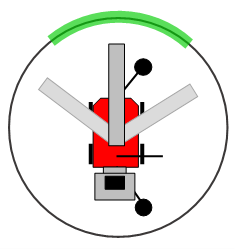 <font 12px/inherit;;inherit;;inherit>Green = Active sensor area</font>
<font 12px/inherit;;inherit;;inherit>Green = Active sensor area</font>
5. Move the telescopeoutwards a couple pulses and then fully back in again.
- a. Check that the position is zero when the telescope is fully retracted.
- b. Check that the zero position sensor is active when the telescope is at zero (fully retracted).
6. Move the arm twice in each direction, passing the home position sensor in both directions.
- a. Check that the sensor is inactive when the arm is parallel with the boom
- b. Move the arm outwards, past 30 degrees, until the sensor indicator becomes active and then inactive again
- c. Move the arm inwards until the sensor indicator becomes active and then inactive again
- d. Repeat the sweep outwards and inwards until the red homing symbol disappears.
- e. Move the arm back to parallel with the boom.
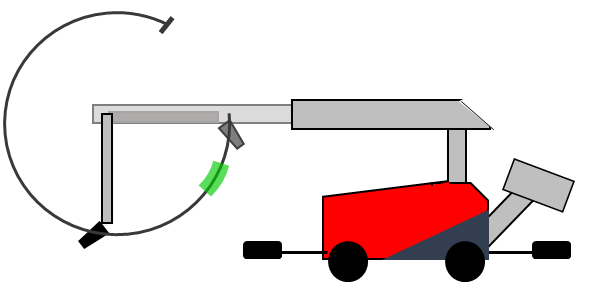
<font 12px/inherit;;inherit;;inherit>Green = Active sensor position</font>
7. Move the nozzle at least two full revolutions in each direction (first, move the arm out so the nozzle is clear from the boom).
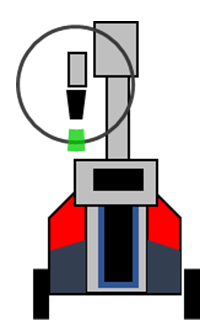
<font 12px/inherit;;inherit;;inherit>Green = Active sensor position</font>
8. Make sure that all red homing dots have disappeared.
- a. If not, retry the homing for the function that has a red homing dot (you might have missed one sweep past the zero sensor).
—
Still having problems even after homing? Your robot could also have lost its parking positions. Contact Envirologic or your distributor for further assistance.