This is an old revision of the document!
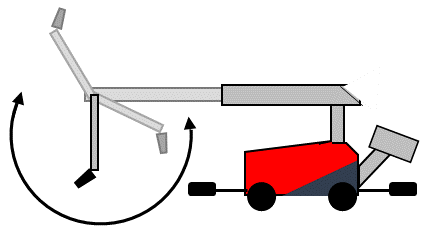
Arm
Motor: 70 rpm
Stroke: parking position to parking+1150, about 315°
Parking: about -55, parallel to boom
The arm is one of the circular movements of the robot and should be used predominantly together with the tower and the nozzle during washing.