
This is an old revision of the document!
Table of Contents
Joystick – Styrning av roboten
Joysticken används för att programmera EVO Cleaner och för att manuellt styra roboten. I det här avsnittet beskrivs hur joysticken fungerar och hur roboten reagerar på dess rörelser.
Joysticken ansluts till det svarta uttaget som sitter under huven på städrobotens bakre högra sida. För att kontakten ska låsas fast ordentligt behöver den vridas 90 grader efter anslutning.
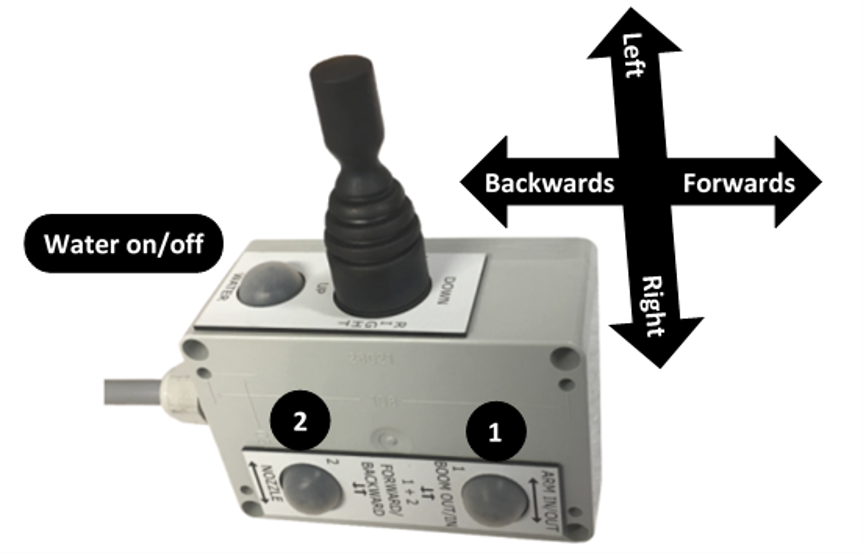
Joysticken har en styrspak som kan föras i fyra riktningar för att styra robotens rörelser.
- Knappen på ovansidan (närmast styrspaken) används för att öppna och stänga vattenventilen.
- De två sidoknapparna (1 och 2) aktiverade olika funktioner när de hålls nedtryckta. Dessa funktioner beskrivs längre fram i dokumentationen.
Joysticken kan endast användas under inlärningsprocessen (inspelning) eller när den manuella styrskärmen är aktiv. Vid alla andra tillfällen är joystickstyrningen inaktiverad.
För att bli bekväm med robotens rörelser rekommenderar vi att du övar på den manuella styrskärmen innan du påbörjar programmeringen.
GO – Rengöringsrörelser
Allmän information
Vissa rörelser är mer belastande för roboten än andra. Hög belastning innebär att elmotorerna behöver arbeta hårdare, vilket leder till ökad strömförbrukning och därmed kortare batteritid. För att maximera robotens prestanda och minimera slitage är det viktigt att använda effektiva rörelsemönster vid programmering.
Rörelser som bör undvikas
Undvik följande rörelser eftersom de ökar belastningen på robotens mekaniska och elektriska system:
- Långa rörelser med bommen upp eller ner när teleskopet är långt utdraget. Ju längre teleskopet är utdraget, desto större belastning utsätts bommotorn för.
- Utdragning av teleskopet när bommen befinner sig i ett högt eller uppåtriktat läge.
- Rotation av tornet när munstycket är riktat åt sidan. När vattenstrålen påverkas av tornets rotation uppstår krafter som belastar elmotorerna. Belastningen ökar ytterligare ju längre ut armen eller teleskopet är utdraget.
- Förflyttning av roboten med munstycket riktat åt annat håll än nedåt. Det höga vattentrycket kan påverka robotens navigering och stabilitet.
Effektiv programmering
För bästa möjliga resultat rekommenderar vi att du följer våra programmeringsprinciper. Genom att använda effektiva rörelser minskar du onödigt slitage, sparar batterikapacitet och utnyttjar robotens fulla potential.
Våra rengöringsprogram bygger i huvudsak på att tornet, armen och munstycket används för att skapa cirkulära rörelsemönster, vilket är den mest effektiva rengöringsmetoden. Bommen, teleskopet och hjulen används främst för kortare förflyttningar mellan olika arbetspositioner.
Säkerhet vid inlärning
Under inlärningsprocessen ska du alltid lämna goda säkerhetsmarginaler för att undvika kollisioner med omgivande objekt.
Referens för rörelseriktningar
I de följande illustrationerna visas och beskrivs alla rörelseriktningar sedda bakifrån roboten.
Bom upp/ner
Bommen rör sig cirka 100° från botten (position 0) till toppen (position 1250). Parkeringsläget ska vara horisontellt (cirka position 700).
 Flytta joystickaxeln bakåt/framåt.
Flytta joystickaxeln bakåt/framåt.
Sliten högre/vänster Tornet kan röra sig cirka 200° i båda riktningarna (positioner ±1000) från sitt parkerade främre läge (ungefär position 0).
 Flytta joystickaxeln åt höger/vänster.
Flytta joystickaxeln åt höger/vänster.
Robot framåt/bakåt Denna funktion räknar avståndet (pulser) från markörerna för att få dess positioner.
 Flytta joystickaxeln framåt/bakåt medan du trycker på knapp 1 och 2 samtidigt.
Flytta joystickaxeln framåt/bakåt medan du trycker på knapp 1 och 2 samtidigt.
Teleskop ut/in Teleskopet kan köras från sitt parkerade läge 0 till position 425.
 Flytta joystickaxeln framåt/bakåt medan du trycker på knapp 1
Flytta joystickaxeln framåt/bakåt medan du trycker på knapp 1
Arm ut/in Armen startar från sitt parkerade läge parallellt med bommen (läge cirka -55). Armen kan gå ut cirka 315° (till läge 1100), så den pekar mot taket.
 Flytta joystickaxeln åt höger/vänster medan du trycker på knapp 1.
Flytta joystickaxeln åt höger/vänster medan du trycker på knapp 1.
Munstycke höger/vänster Munstycket kan rotera 360° i båda riktningarna. Munstycket är parkerat när armen är parkerat och munstycket pekar nedåt.
 Flytta joystickaxeln åt höger/vänster medan du trycker på knapp 2.
Flytta joystickaxeln åt höger/vänster medan du trycker på knapp 2.