Table of Contents
The water jet effect the steering
Description
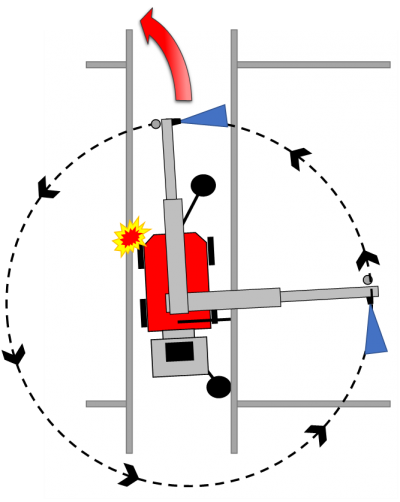
The water jet effects the steering of the robot. If you for example want the robot to move from point A to point B with water on, you should know about the following information. The illustrations below are examples when the side wheels are angled to the right. Same principle goes for the left side but vice versa.
How to move the robot with water on
Have as few transports as possible. Since the system is based on the robot steering towards the wall, the distance must be long enough that it has time to steer towards the wall before turning and going in the other direction again. Repeated short runs back and forth often mean that it never steers and the robot can end up being too far from the wall. If you must have longer transportations, you must think through how the nozzle is pointing. The power from the water jet will push the tower/robot which potentionaly steer the robot, making the side wheels leave the guidence wall.
When moving the robot, always have the telescope retracted fully (as short as possible) and have the nozzle as close to the robot as possible. Aim the water jet straight away from/ or straight towards the robot. This is to prevent the robot to steer sideways due to the force from the water jet.
The effect gets greater the further away the water is from the robot. This is why we want the telescope retracted fully and the arm have a position where the nozzle is close to the robot. See the illustration below.
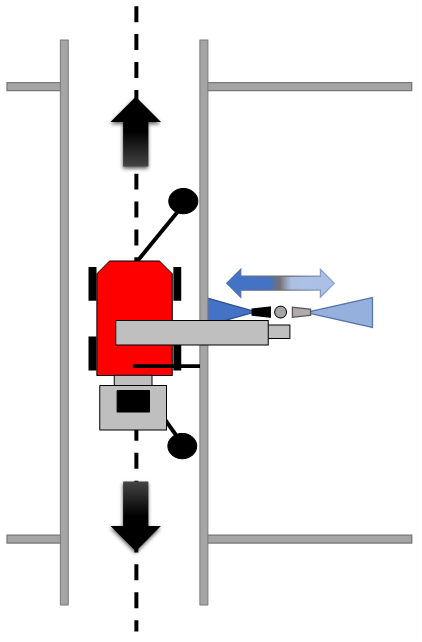 Correct way to move the robot with water on.
Correct way to move the robot with water on.
This is a great opportunity to wash the wall closest to the robot. Simply aim the nozzle straight towards the robot and place the water jet in the middle of the wall (vertically) as you drive the robot to the next position. We do like this when programming the wall program where we go from one corner to another, for example.
Don't do this when creating a program
If you're not following our recommendations the robot will lose track of the steering. This could of course lead to collisions in the aisle if the robot hits a wall. It could also lead to collisions inside the pen when the robot deviated from its guiding wall.
Backwards
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
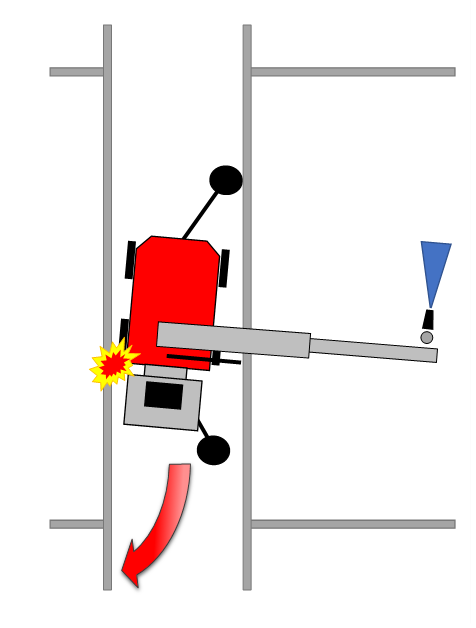
If the nozzle is aimed forward/left and the robot moves backwards, the rear end of the robot moves out. Same principle if the tower is pointing in any other direction with water sideways.
Forward
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
<font inherit/inherit;;#ffffff;;inherit>.</font>
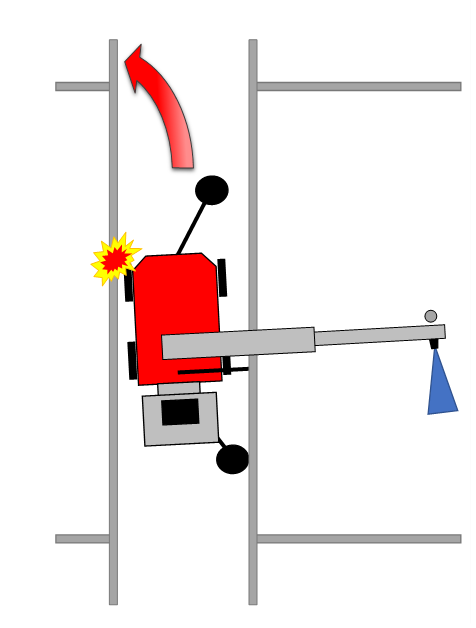
If the nozzle is aimed backwards/to the right and the robot moves forward, the front of the robot moves out. Same principle if the tower is pointing in any other direction with water sideways.