
Table of Contents
Virtual markers
Virtual markers are a function to use in long stables with many identical pens in a row. It mainly purpose is to make you carry around less markers.
Read more general facts about magnetic markers here.
Go to magnetic marker specification list.
Description
Instead of having markers at every pen you place a marker by every other pen. The markers are supposed to be placed at one side of the row only, as it is without using virtual markers. The robot creates the virtual markers in between the physical markers (exactly in the middle of the physical markers). The robot will also always create a virtual marker after the last physical marker with the half distance as the two last physical markers has between them (see illustrations below).
However, there are still a few things you must have in mind when using virtual markers.
- The robot can only start an automated wash from a physical marker.
<font inherit/inherit;;#ffffff;;inherit>.</font> - You can only teach a program from a physical marker. This means that you temporary must place a marker at the pen during programming if you want to program a pen where there is a virtual marker. Remember that the temporary marker must be placed at the same place in the inventory as the other physical markers (where the virtual marker is supposed to be).
<font inherit/inherit;;#ffffff;;inherit>.</font> - Virtual markers are used for repeating programs that was created from a physical marker.
<font inherit/inherit;;#ffffff;;inherit>.</font> - When creating recipe, have in mind that the last marker of the recipe is a virtual marker. This means that you might not be able to use this marker in the recipe due to the fact that it might be placed in the outer wall (see illustrations below). So, think through if you should place a program at the last marker or leave the last marker empty in the recipe.
<font inherit/inherit;;#ffffff;;inherit>.</font> - The last pen in the row should be learned from the last physical marker.
Examples
The following examples illustrates the right side of a row only. But same principals are used and applied for the left side as well when programming. Markers is only placed on one side of the row.
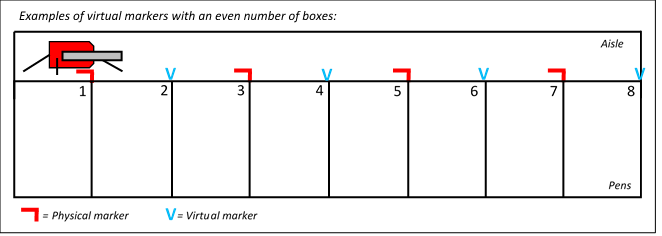
In this example, there are 4 physical markers in every other position. Between these, 3 virtual markers are created where otherwise there would have been physical markers. As mentioned in the text above, a virtual marker is also created after the last physical marker and in this example, it ends up in the wall. So, the last marker will not be used in the recipe build-up, so you shouldn’t place any programs at marker 8 in this example.
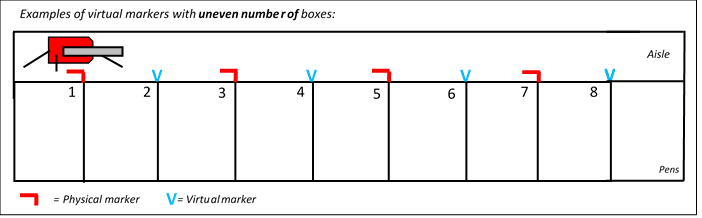
Here we have an example where the last virtual marker (between pen 8 and 9) can come to a use if it’s possible to use the same program in the last pen as in the others. Otherwise, you'll have to make a new program for the last pen.
Note that you can only learn a program from a physical marker. So in this case, the program for the last pen (pen 9) has to be learned from marker 7 which is the last physical marker. When you create a program for the last pen, choose a start position past pen 8. As you can see below.
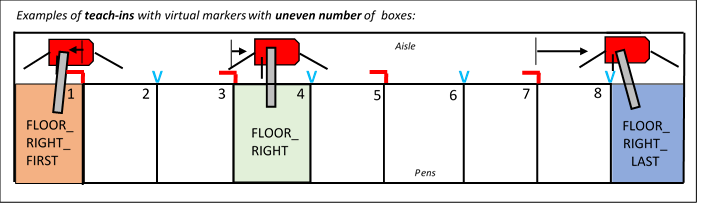
Since the program for the last pen is learned from marker 7 (last physical marker), this program must also be placed at marker 7 in the recipe.
If there are identical boxes, you can place same program for each of these markers. A program from a physical marker can also wash from a virtual marker. Notice that marker 8 is without programs in these examples. It's very important to understand how the robot will move for each program. Is it possible to use the last virtual marker in the recipe?
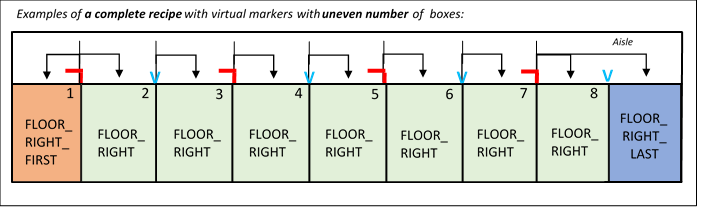
From the example above, the programs are placed at (add left side programs with the same principle):
- Marker 1 (Physical): FLOOR_RIGHT_FIRST and FLOOR_RIGHT
- Marker 2 (Virtual): FLOOR_RIGHT
- Marker 3 (Physical): FLOOR_RIGHT
- Marker 4 (Virtual): FLOOR_RIGHT
- Marker 5 (Physical): FLOOR_RIGHT
- Marker 6 (Virtual): FLOOR_RIGHT
- Marker 7 (Physical): FLOOR_RIGHT and FLOOR_RIGHT_LAST
- <font inherit/inherit;;#000000;;inherit>Marker 8 (Virtual): - No program</font>